以下は個人的な覚書です、間違えてる部分や後日変更した個所もあります、参考程度にとどめておいてください
・部材は結構余ります、Tナットなど特に
・Tナットを少し移動させる棒などがあると便利(両端がレールより少し細い、右には両面テープ)、磁石で外側から微調整はやりにくい
・フレームを浮かせる台があると良いかも
・ビスを取り分ける小皿やBOXがあると取付忘れがなくなる
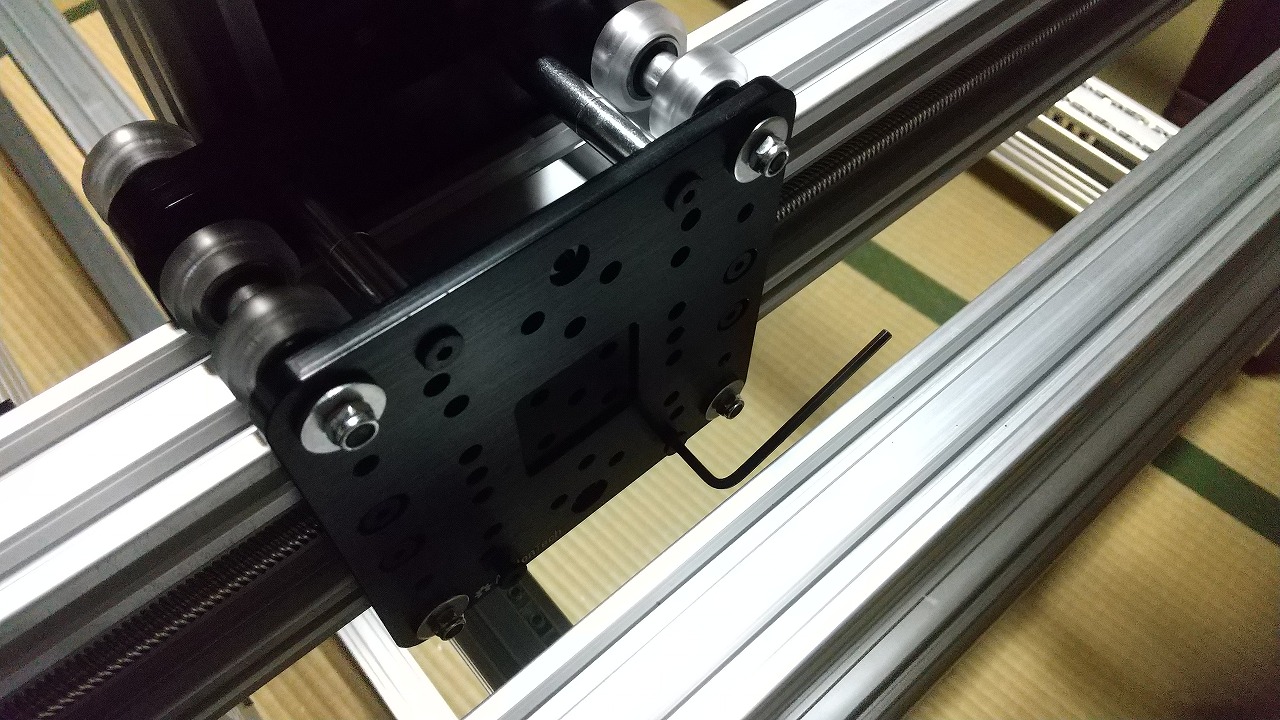
・工具は入れてくれてます、探してみましょう(私は最後まで気づきませんでした)、ただしレンチだけですのでドライバータイプの物があると便利でした





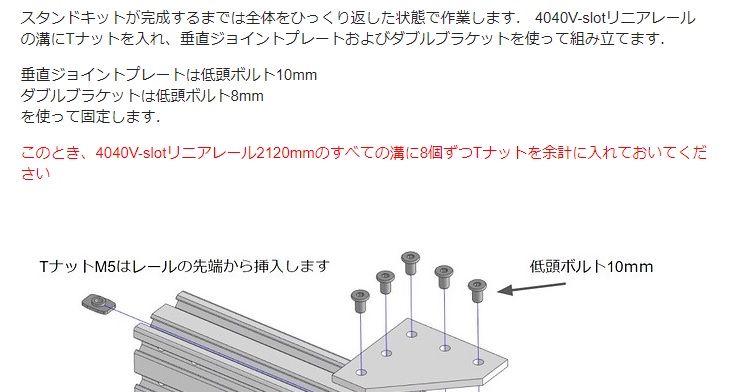
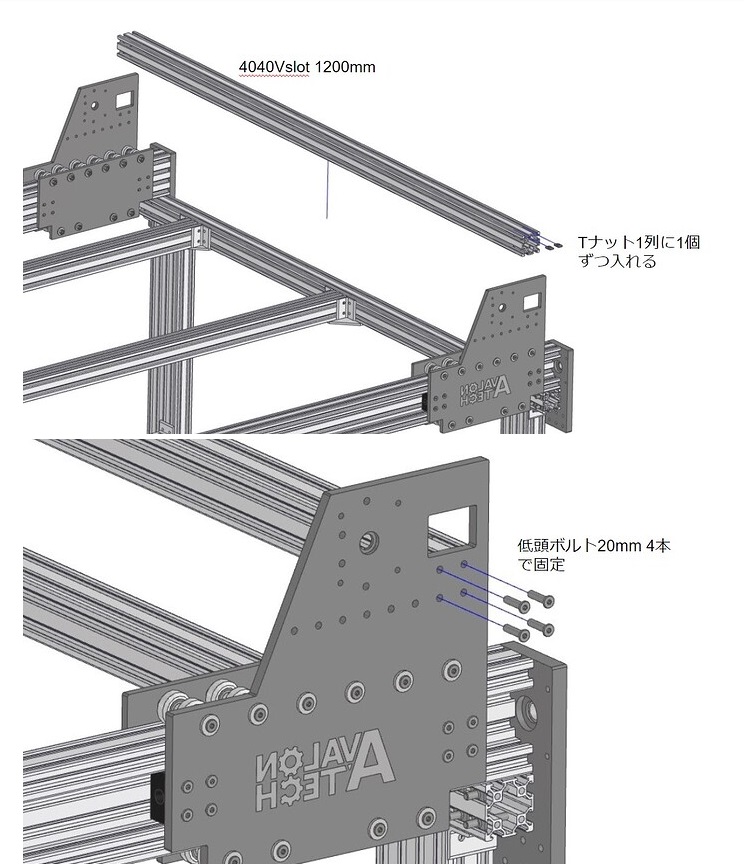
・フレーム組み立てで 4040V-slot 2120mmすべての溝に8個づつTナットを… とありますが少し理解できず、
合計192個突っ込みました、2120が3本×8溝(上下側面)×Tナット8個づつです。
私の場合192個突っ込んで7割ほど余ってますが、天板付ける時に使うと思います。
Tナットはいっぱい余ります!横方向の1200mmの溝にも突っ込んで良いと思います、後で電源付けたりするかもしれません。

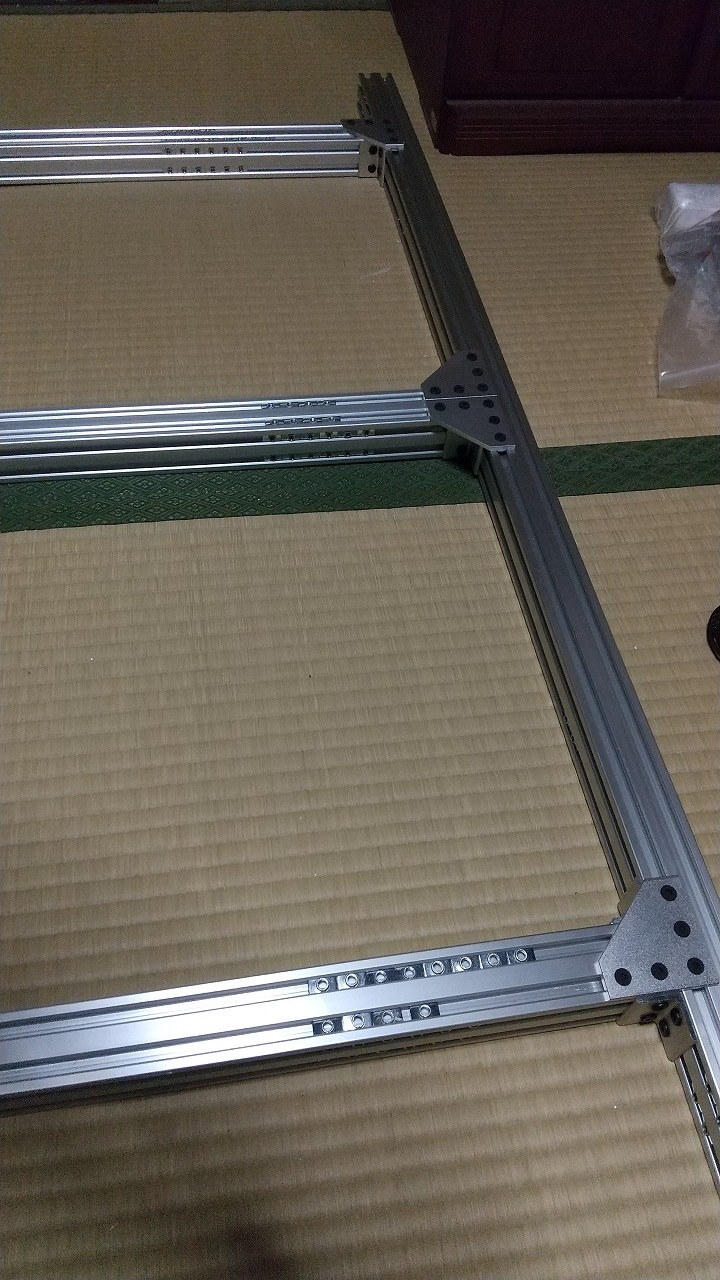

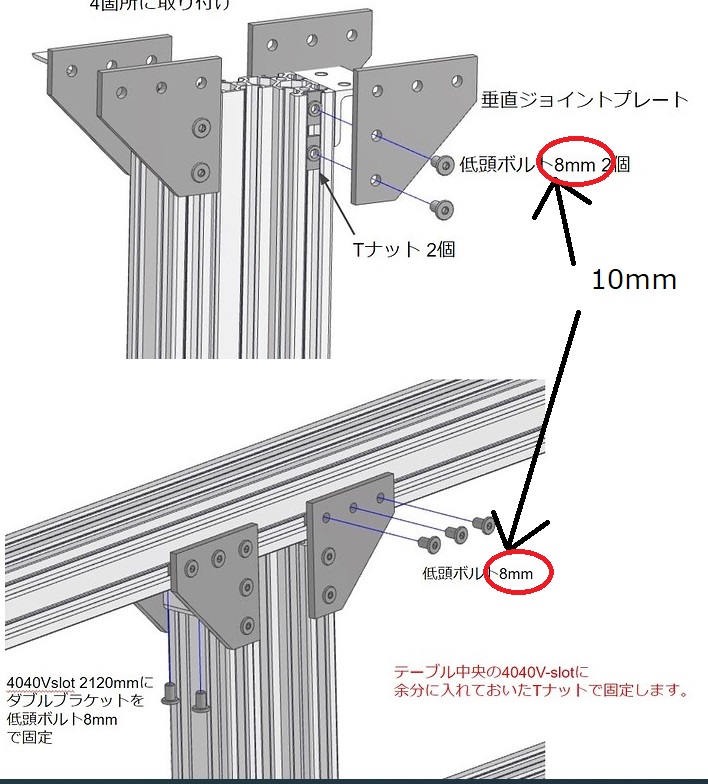
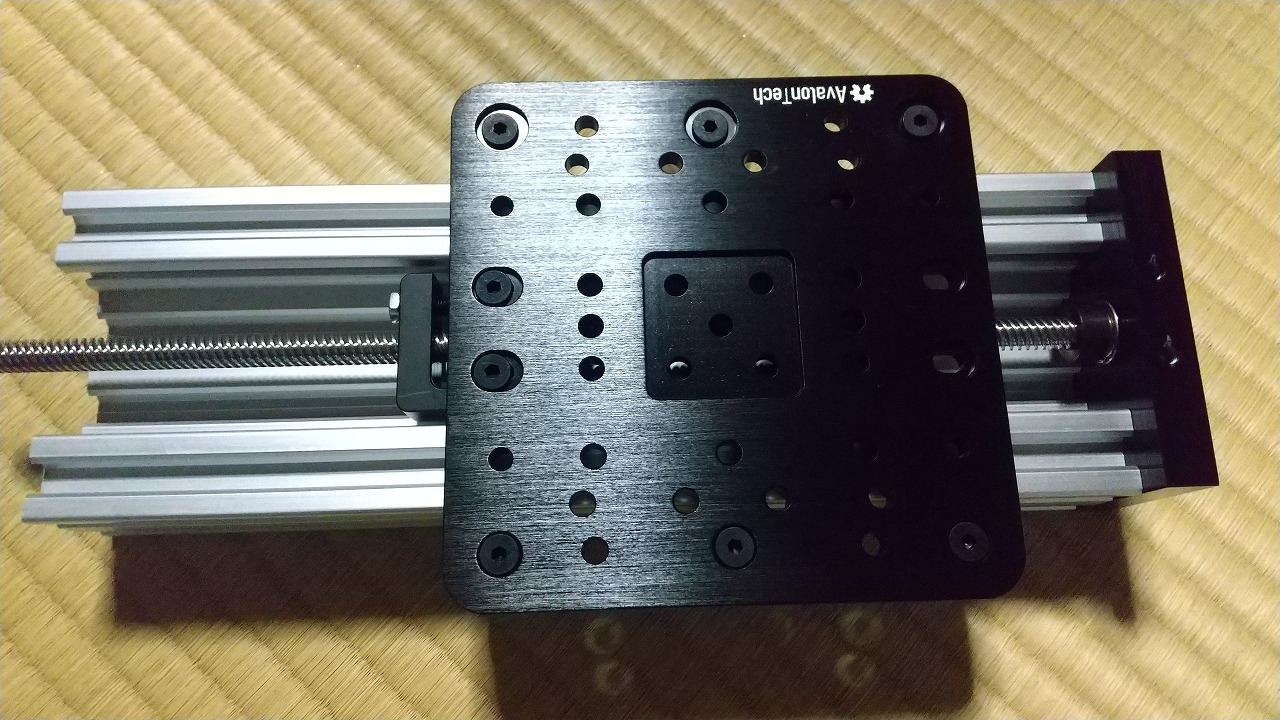
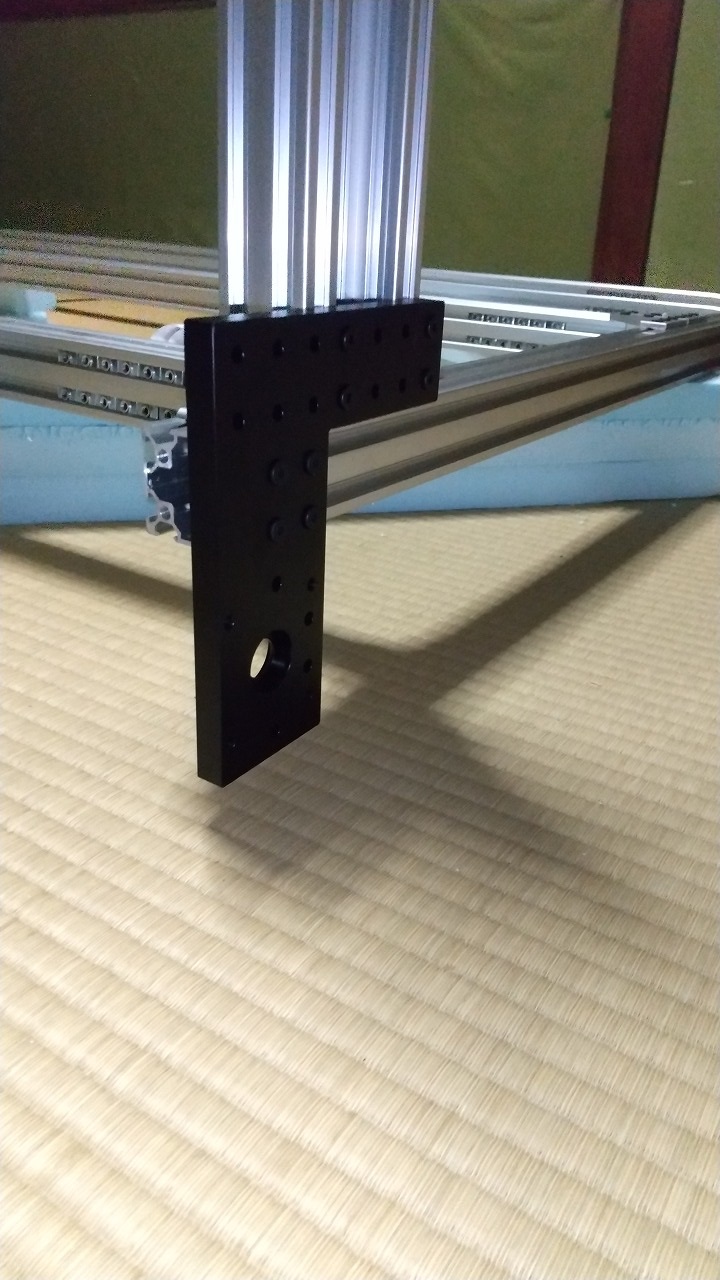 ・8mmでなく10mmで付けました
・8mmでなく10mmで付けました
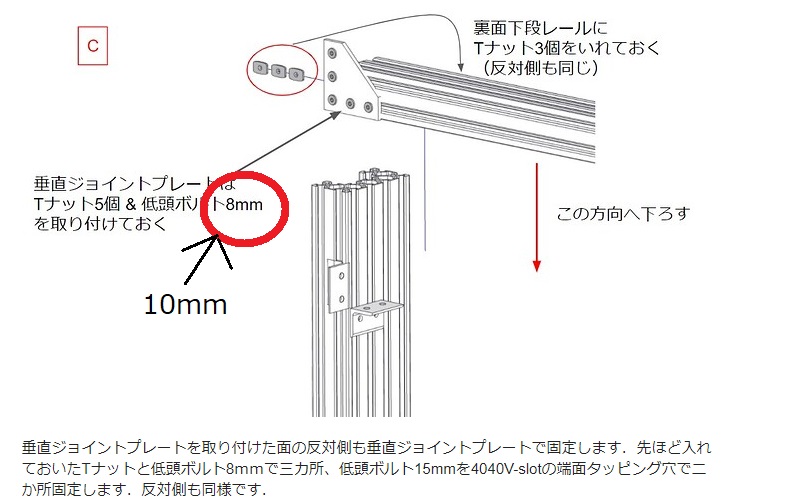


 ・8mmでなく10mmで付けました
・8mmでなく10mmで付けました

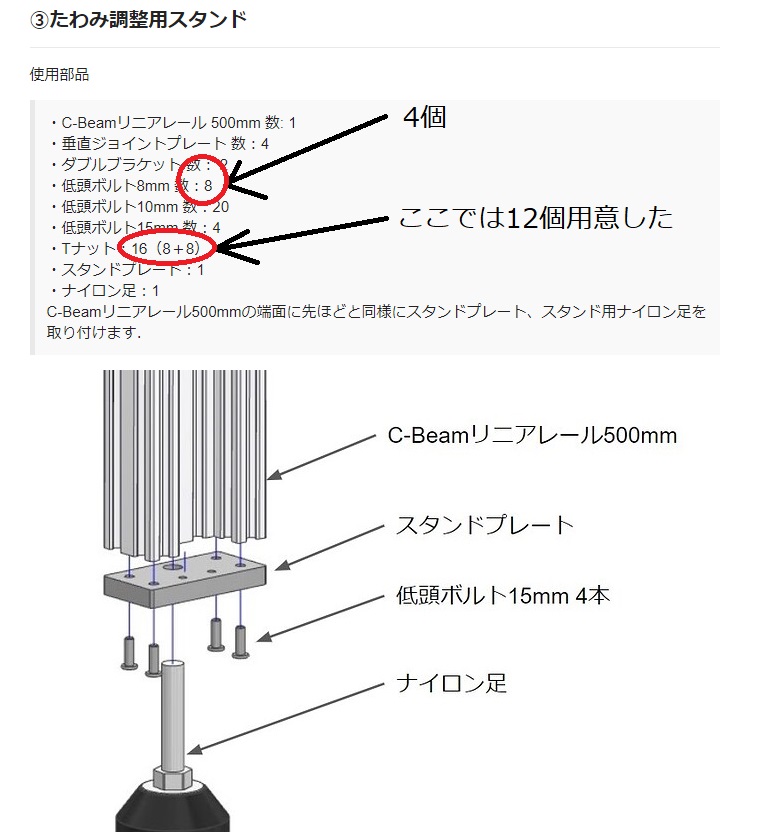
 ・8mmは4個だけ、Tナットは事前に入れてる分を使うのでここでは12個用意すれば足りた
・8mmは4個だけ、Tナットは事前に入れてる分を使うのでここでは12個用意すれば足りた
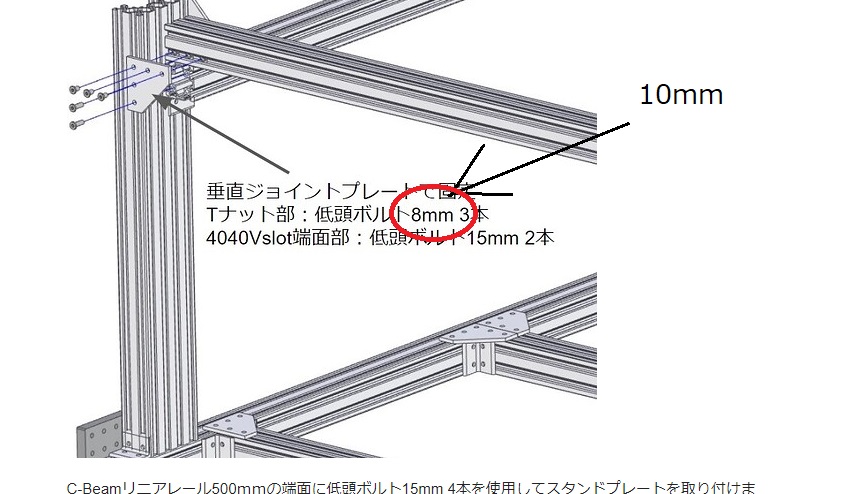
 ・8mmでなく10mmで付けました
・8mmでなく10mmで付けました



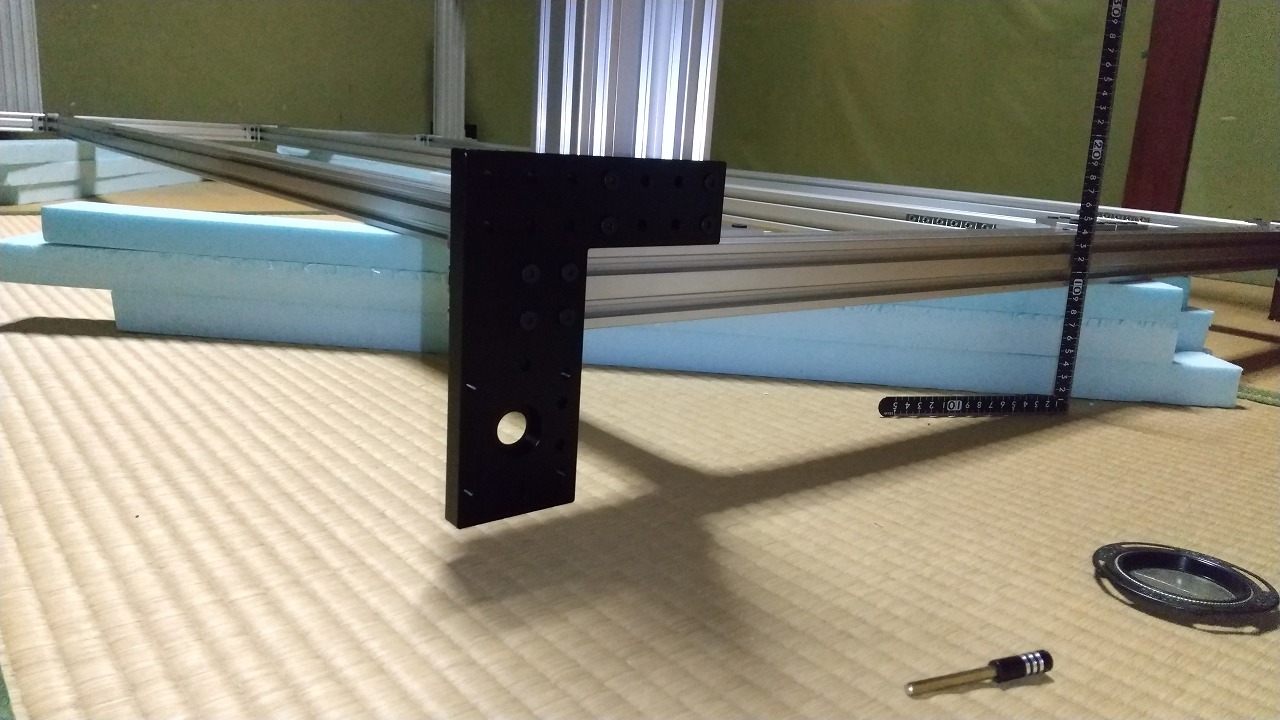
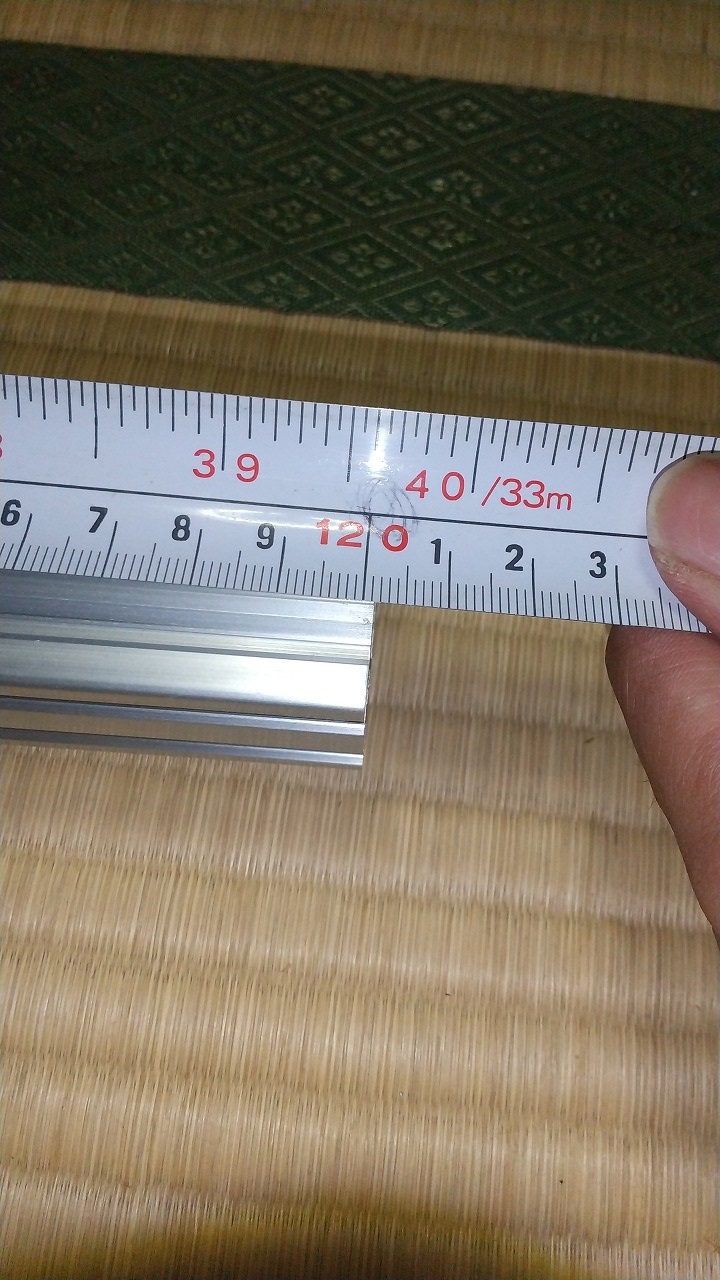
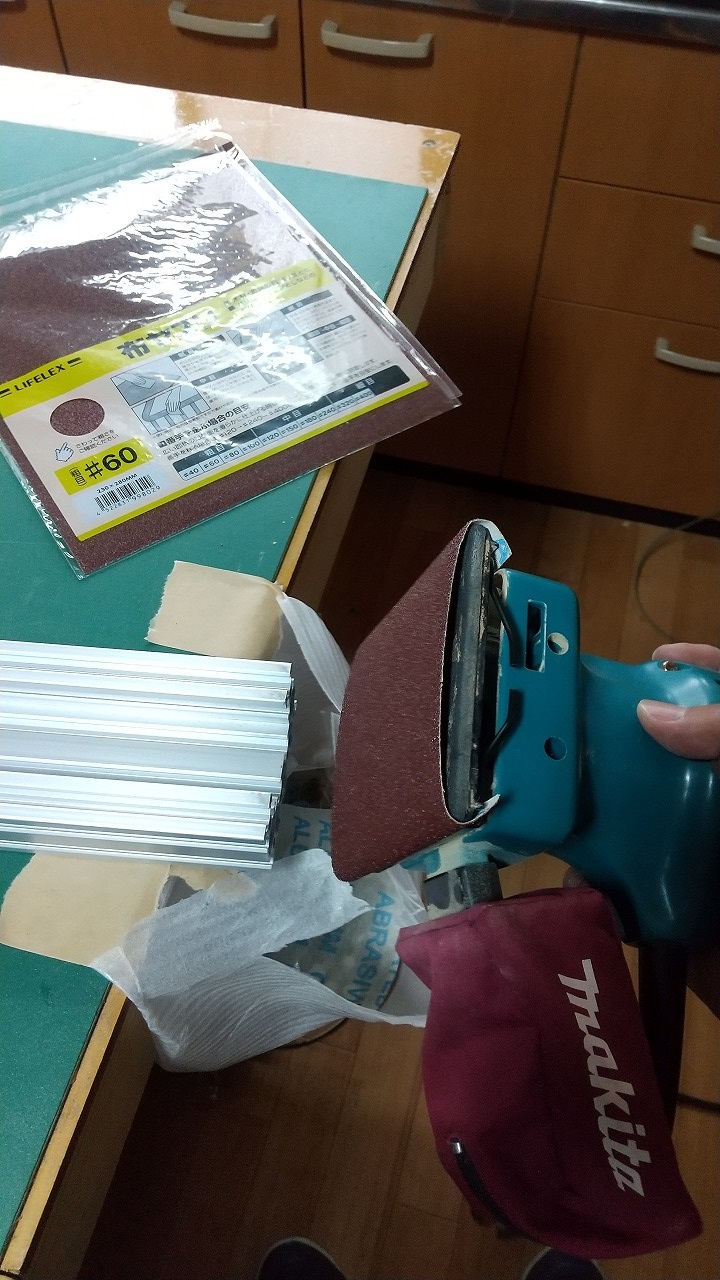
・1200mmのV-slotとリニアレールが1.5mmほど長く1201.5mmあり、そのままだと組み込めません。
写真の削る前が上、削った後が下。手元に電動のサンドペーパーがあったので使いましたが、鉄ヤスリのが良いかもしれません

・こちらの箱にも部品入ってます




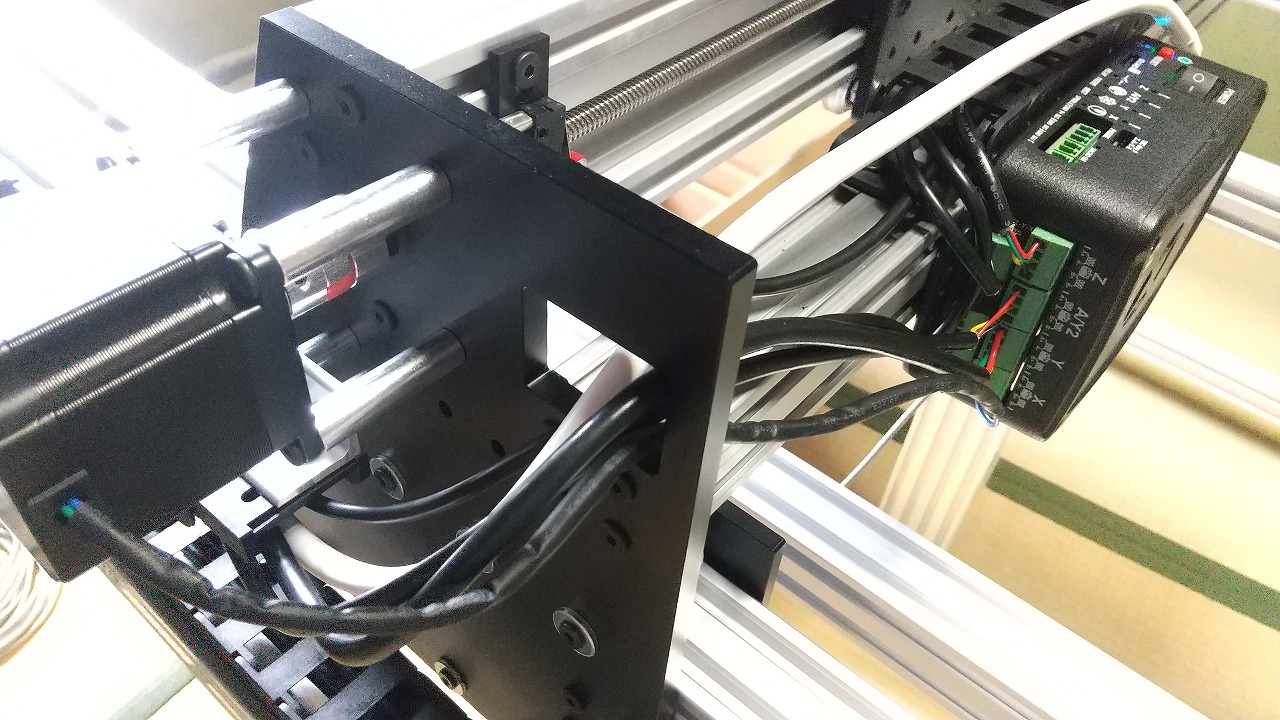
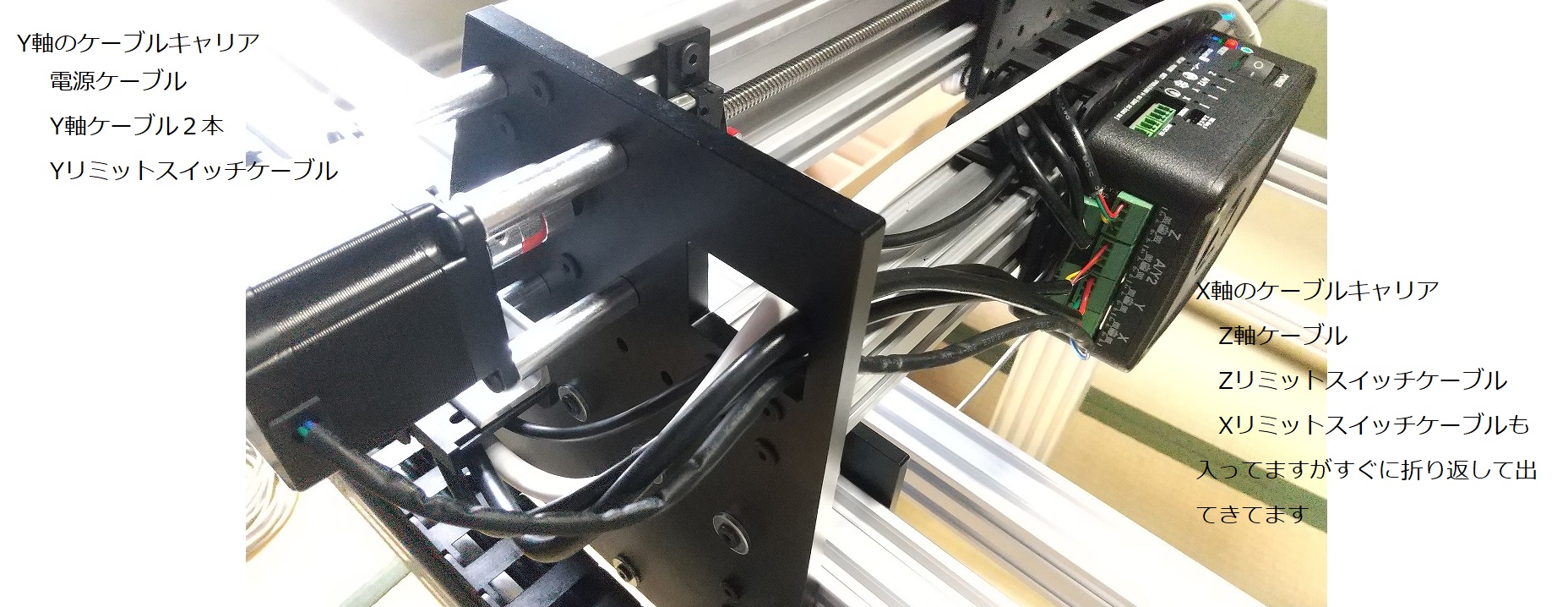
・ケーブルキャリアのXZは1本+9個、Yは2本+13個 だったと思います
BOXの位置などで変わるため後から足したり引いたりしました、もうわかっていません。

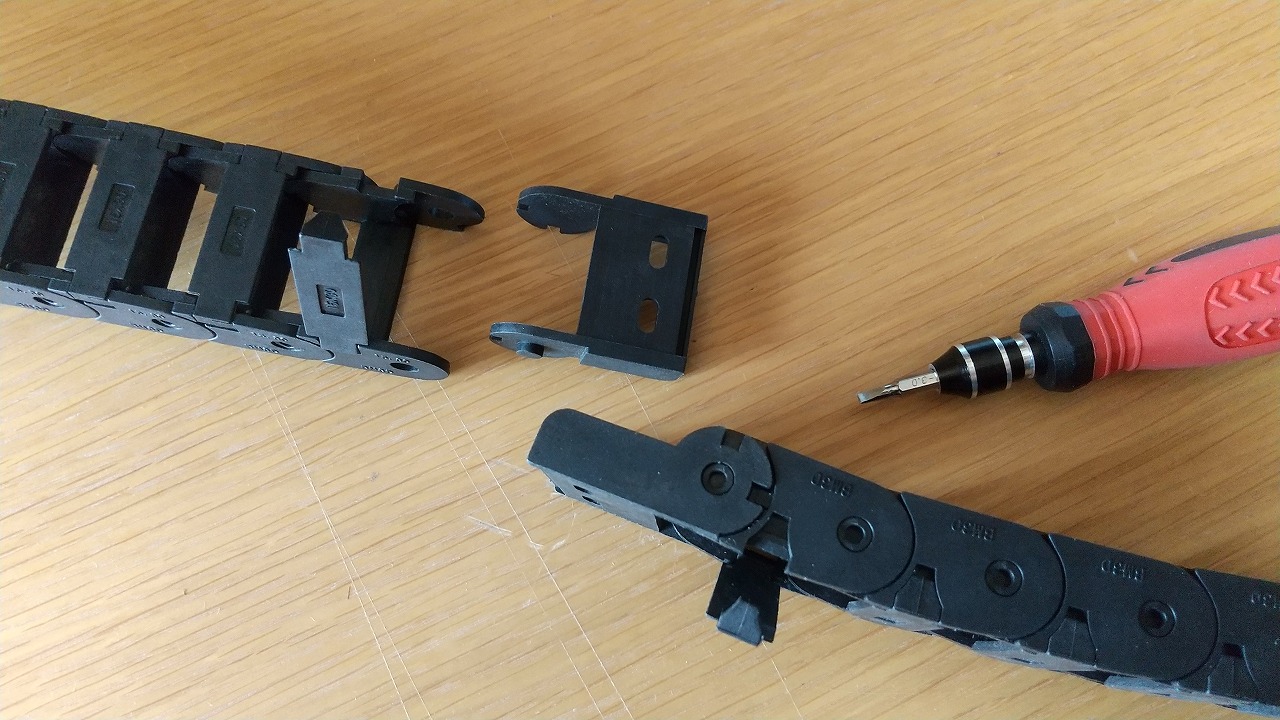

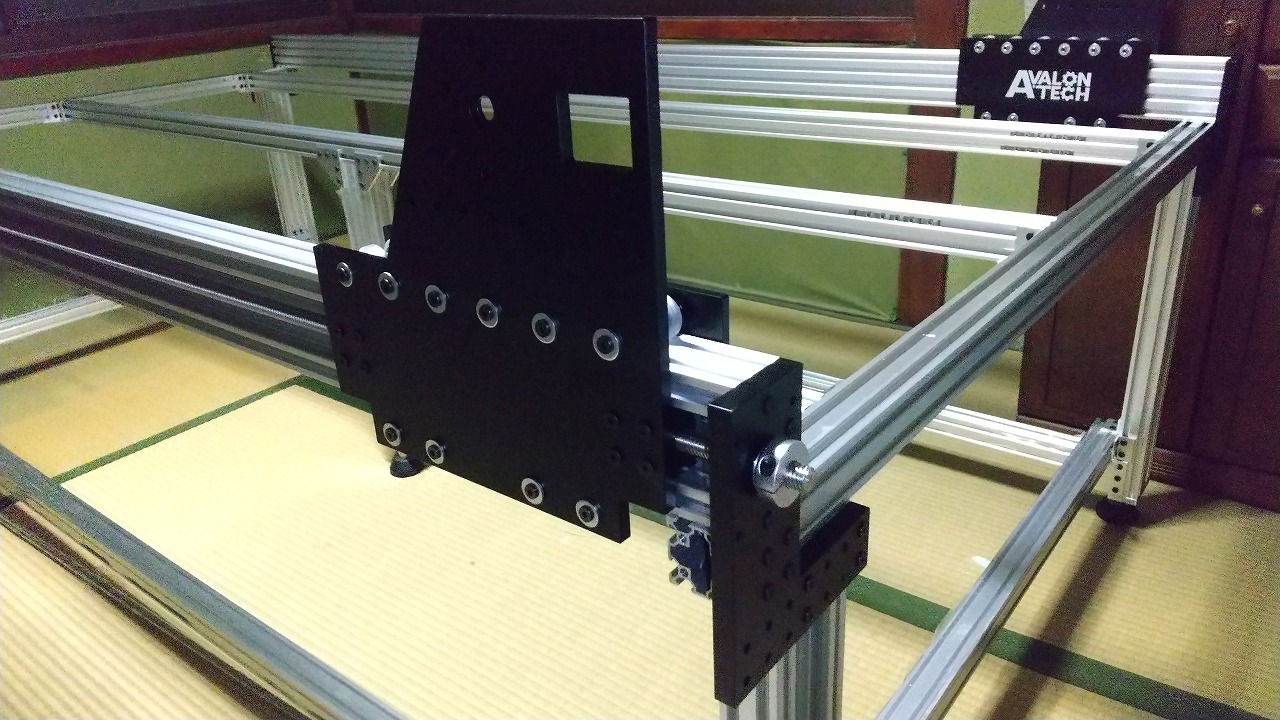
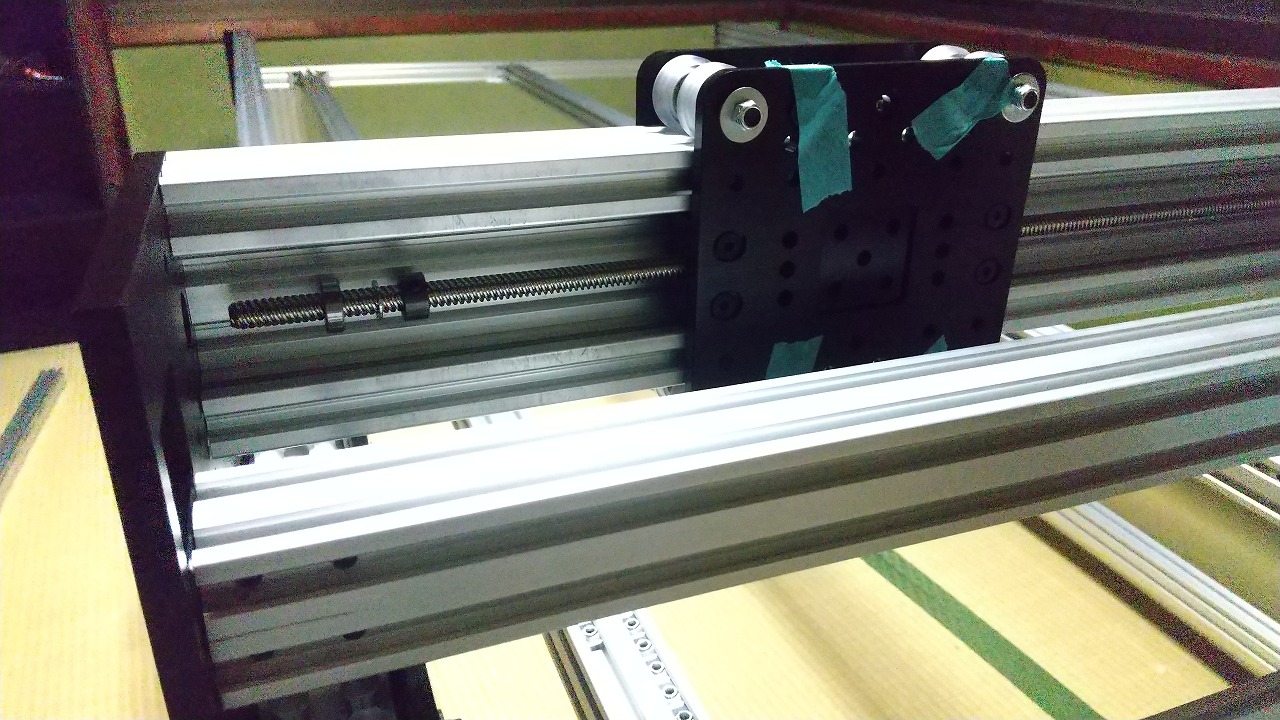
・この後、BOX取付位置がY軸のリードスクリュー横の写真が出ますがそこだとケーブルの長さが足りません
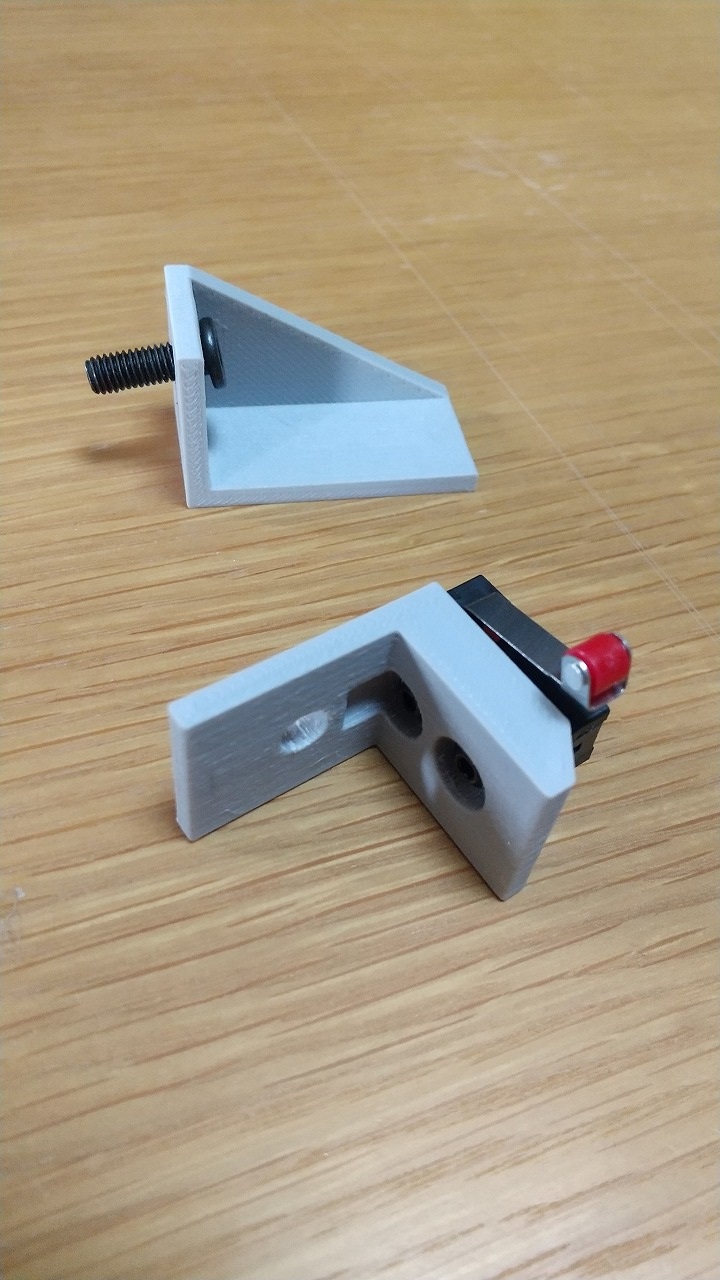
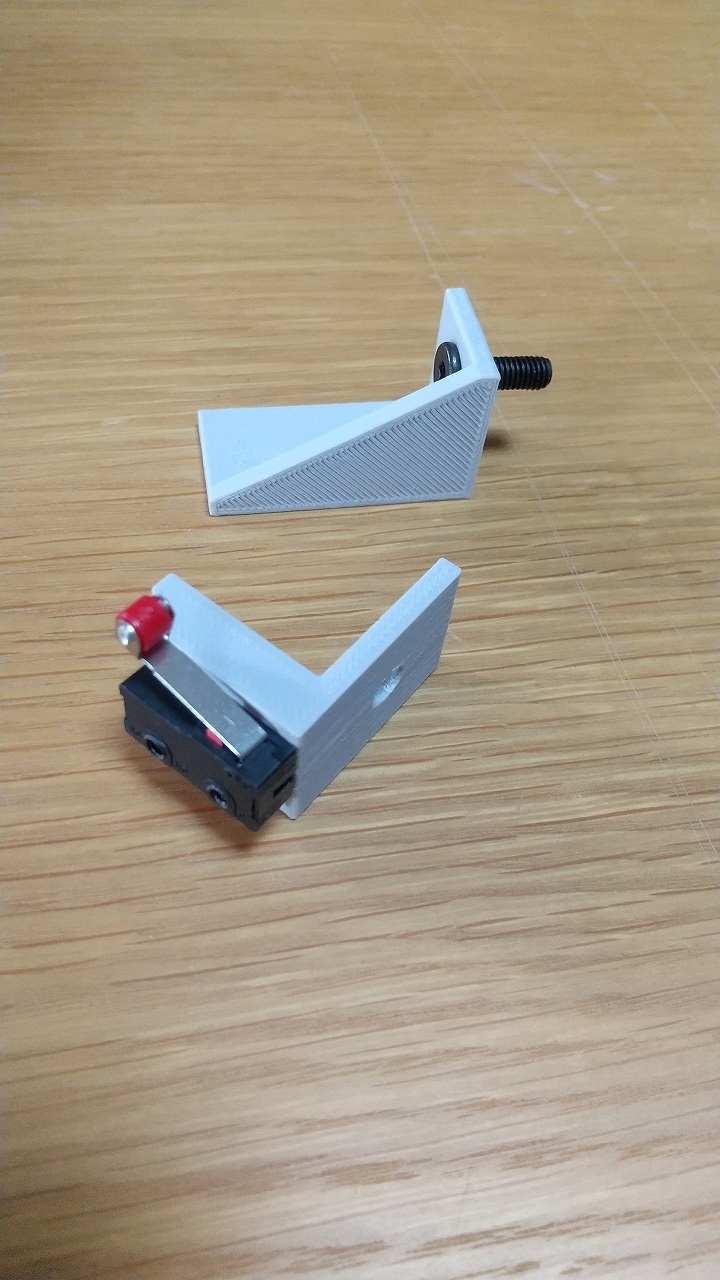
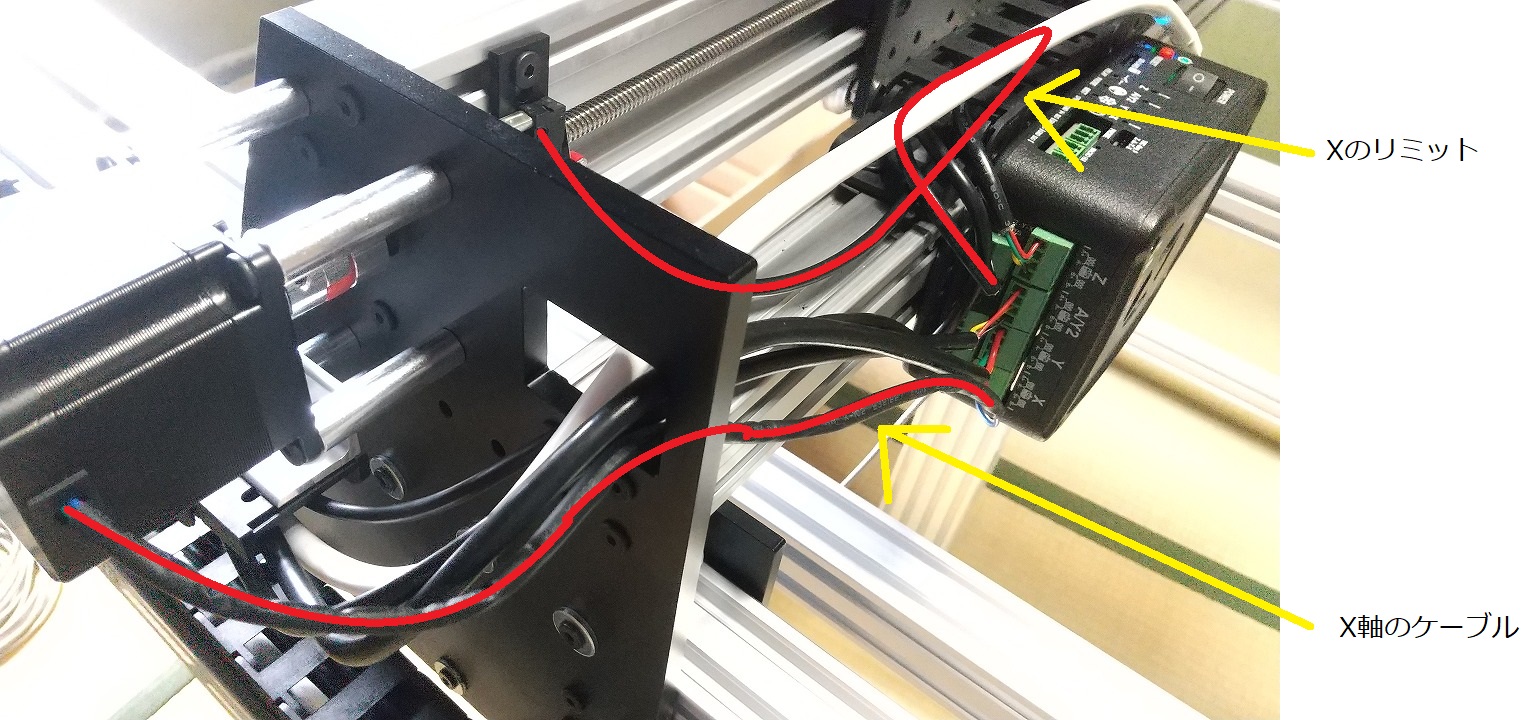
・ついでにリミットスイッチの位置も勘違いして付けた写真が出ます、最後の写真を見てもらえたらと思います。
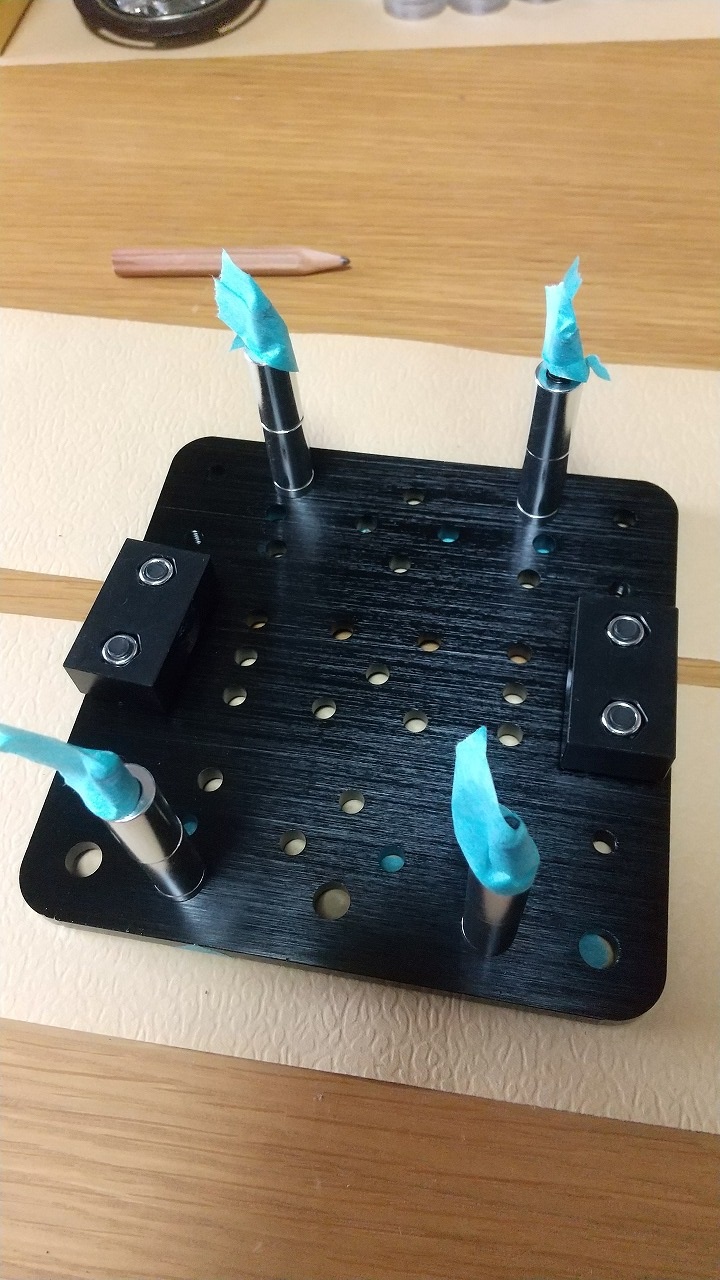
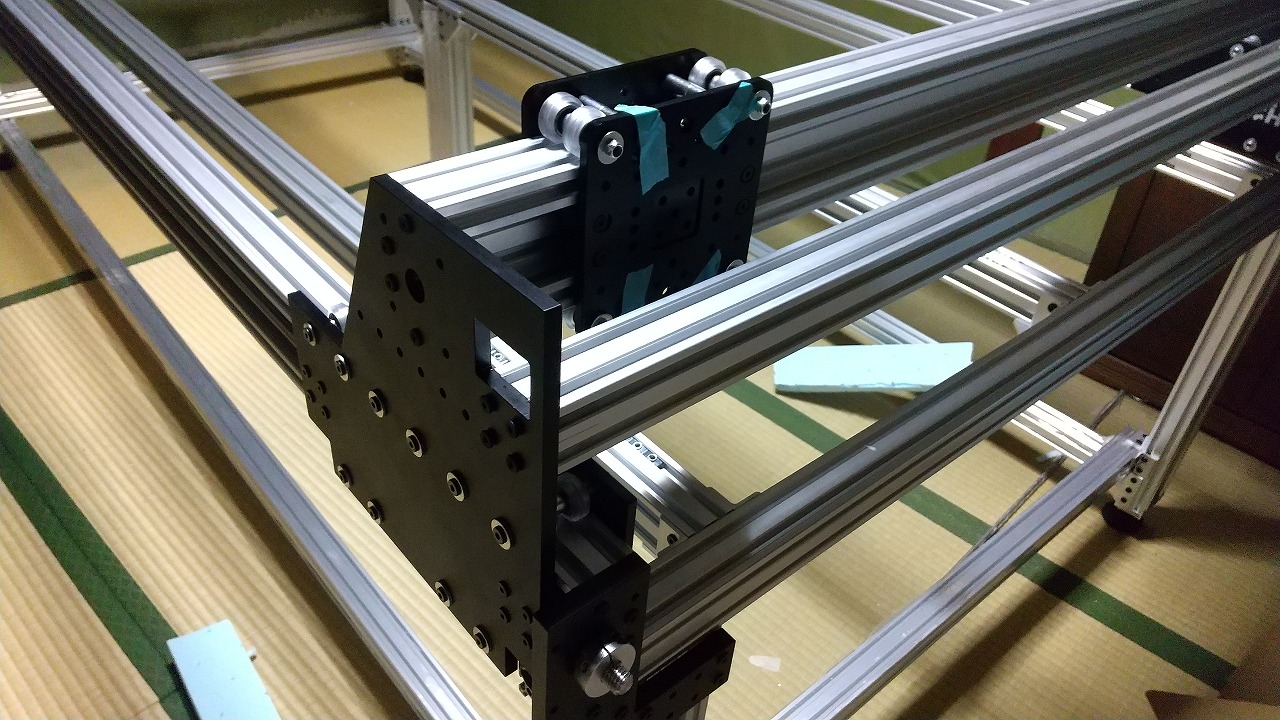
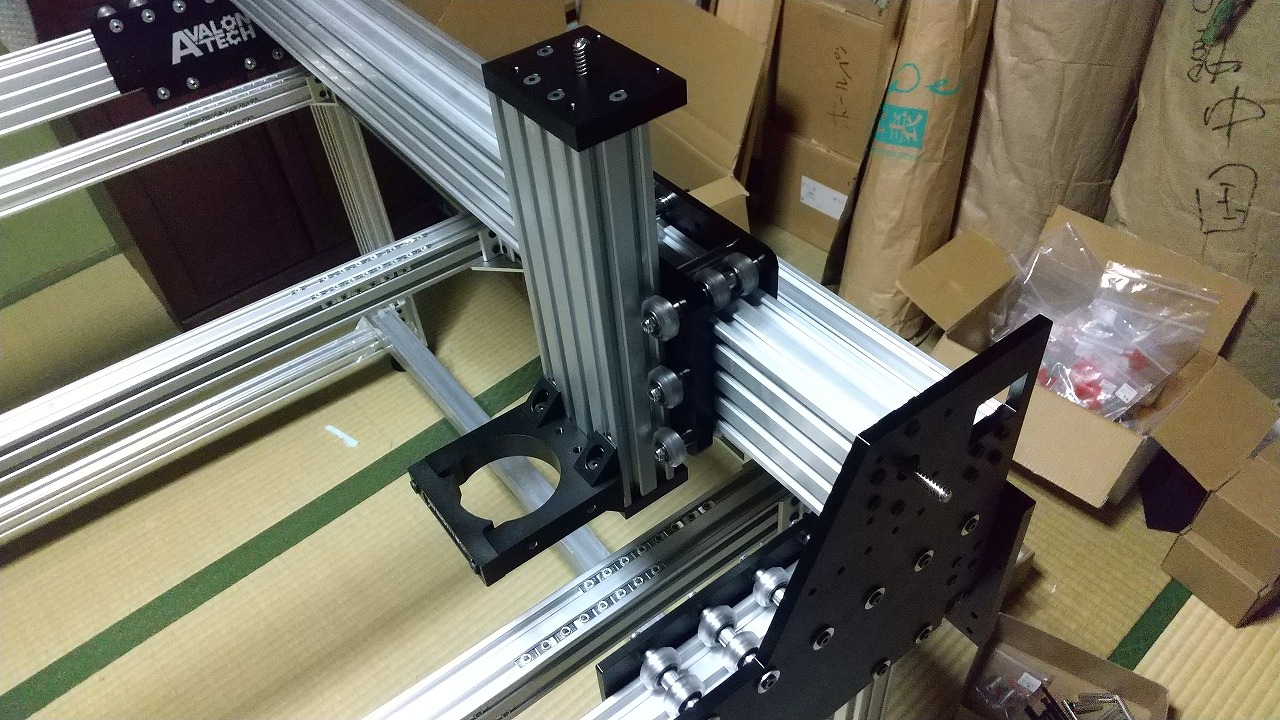
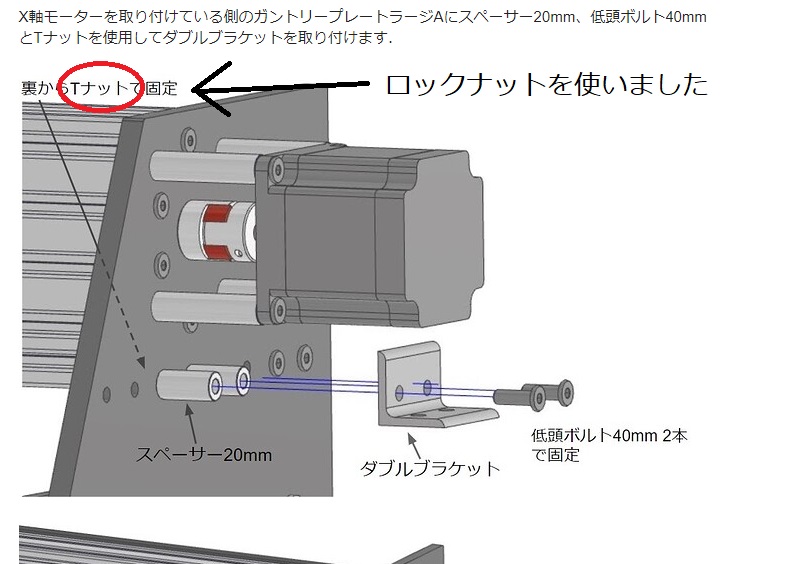
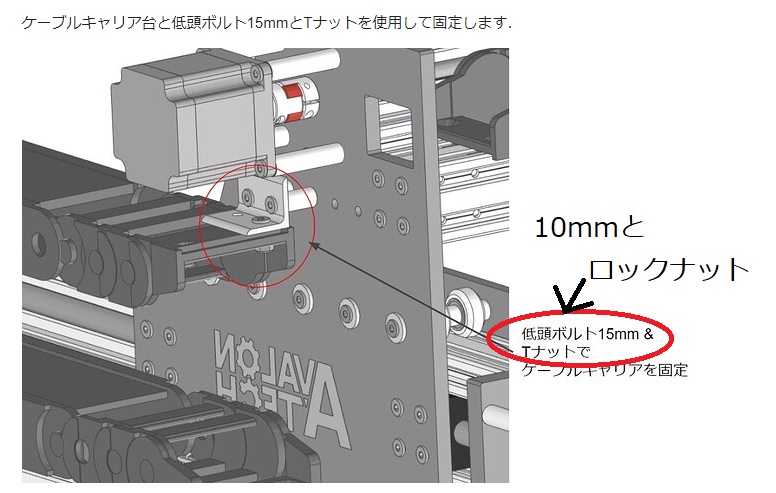
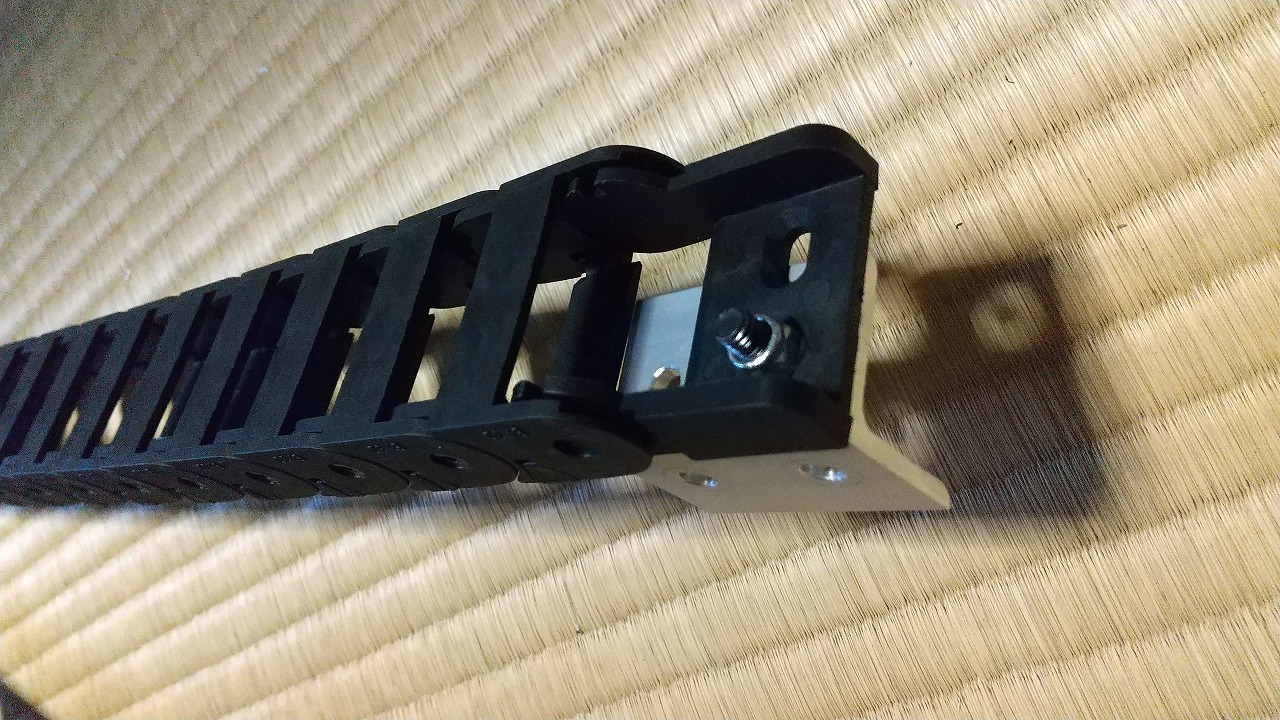
・Tナットでなくロックナットを使いました
 ・10mmの方が頭が飛び出しません
・10mmの方が頭が飛び出しません

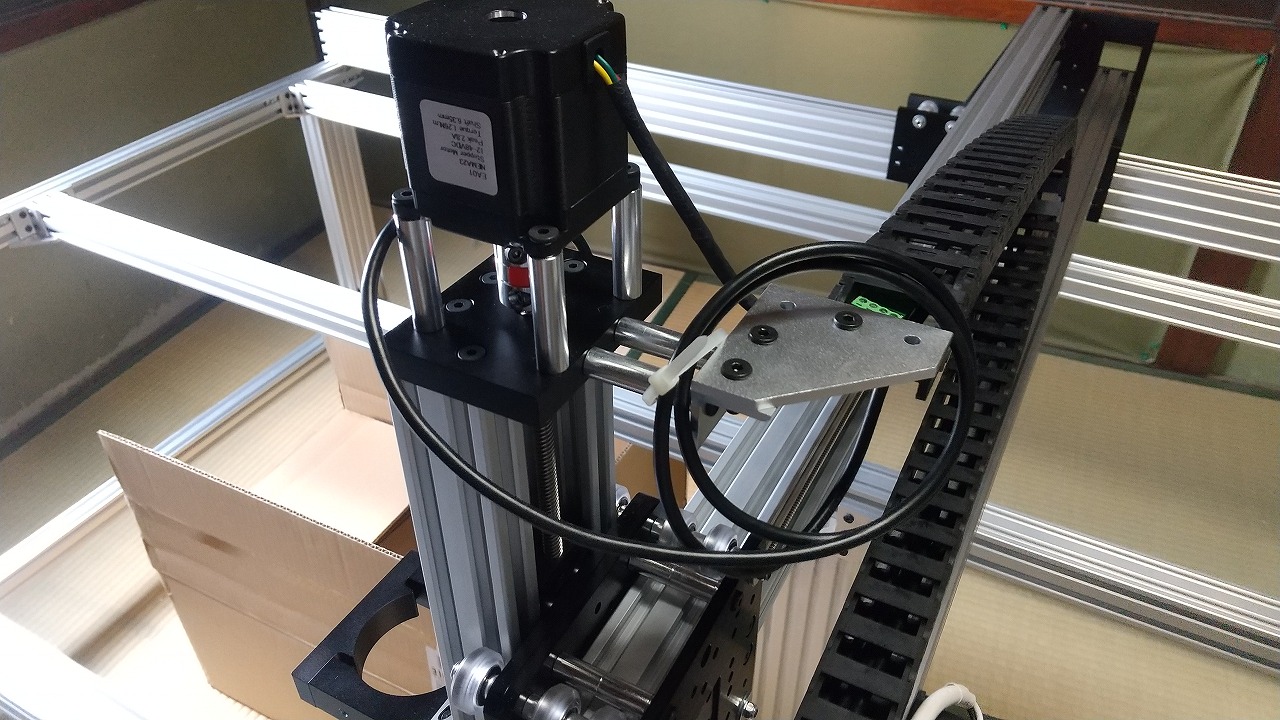
・BOXの位置が悪くケーブルが届いてませんので変更していきます
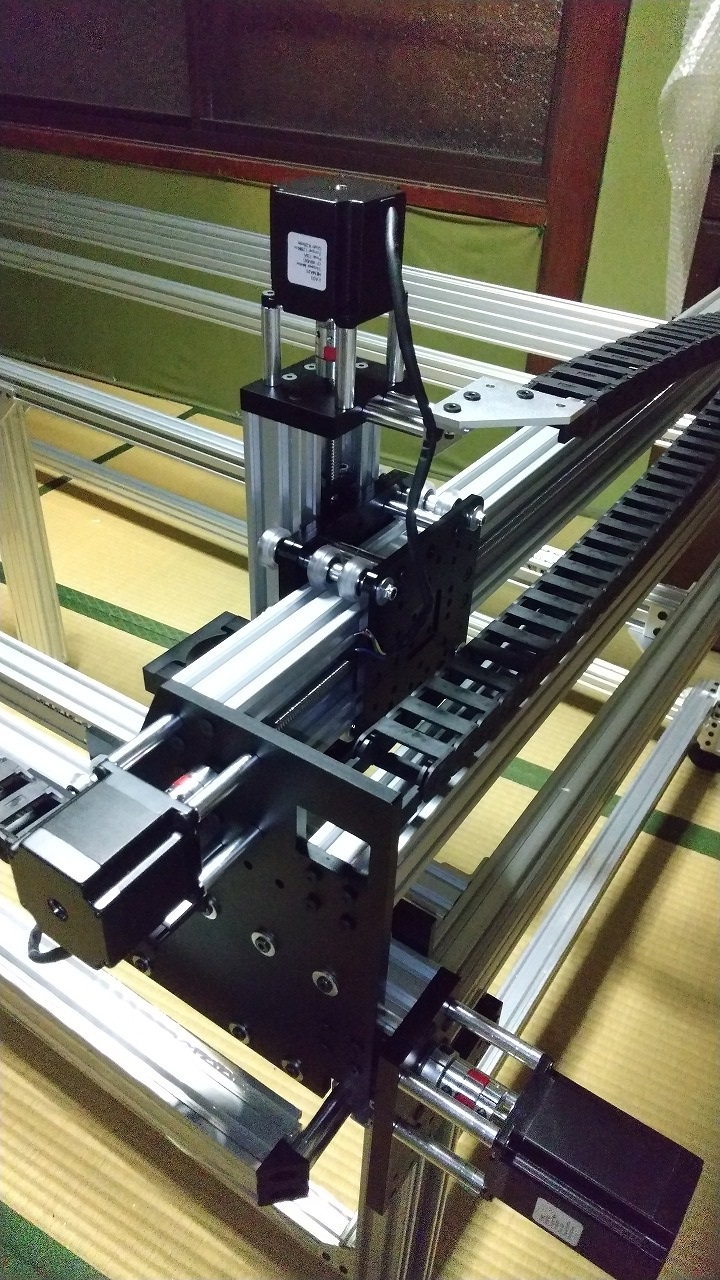
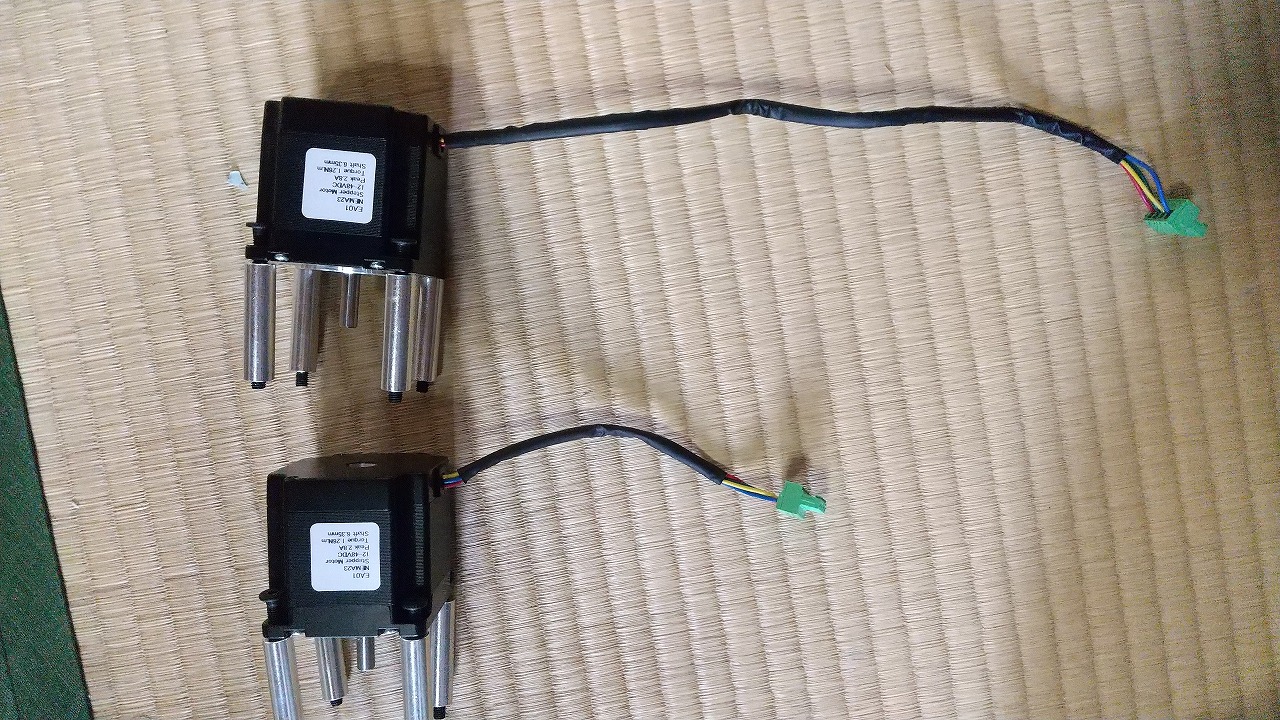
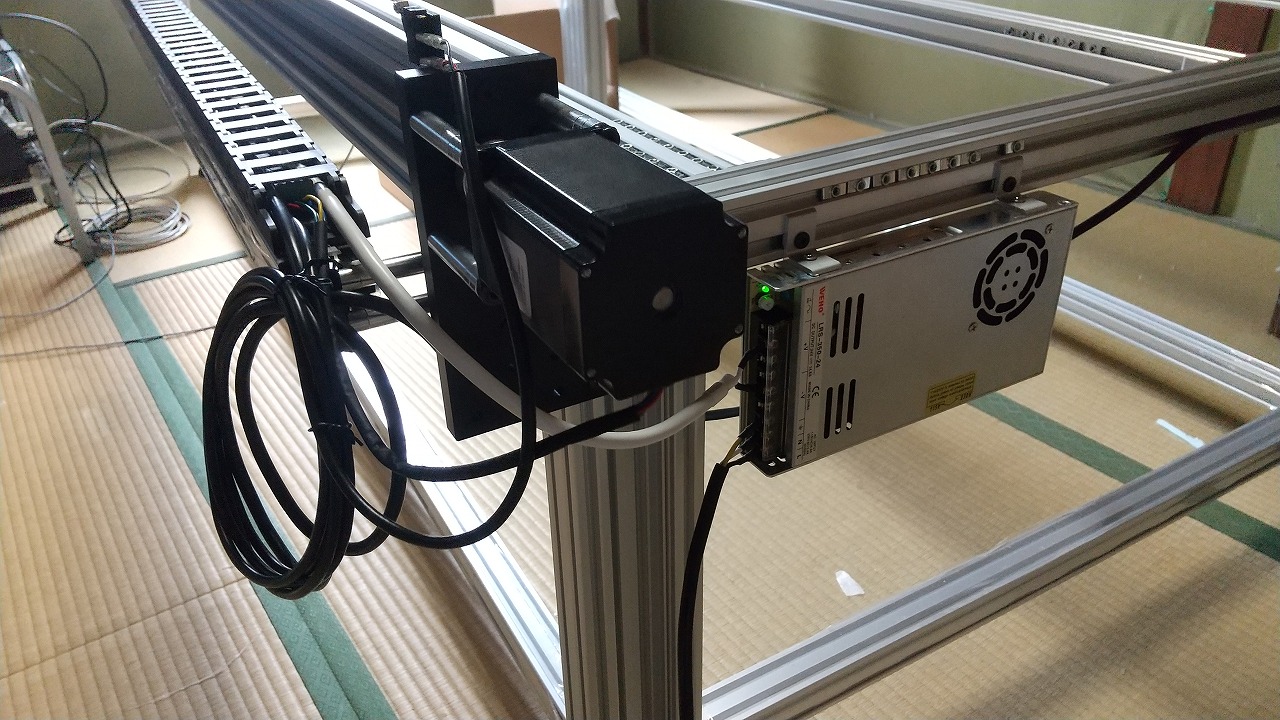
・XとZ軸用のステッピングモーターですが、ケーブルの長い方をXにして延長使わずBOXに直接差しました
・ここで初めて気づいたのですがモーターに凹みがありました、カップリングと位置を合わせてネジを止めておきます

・3DプリンタでZ軸用リミットスイッチ受けと接触箇所を作りました


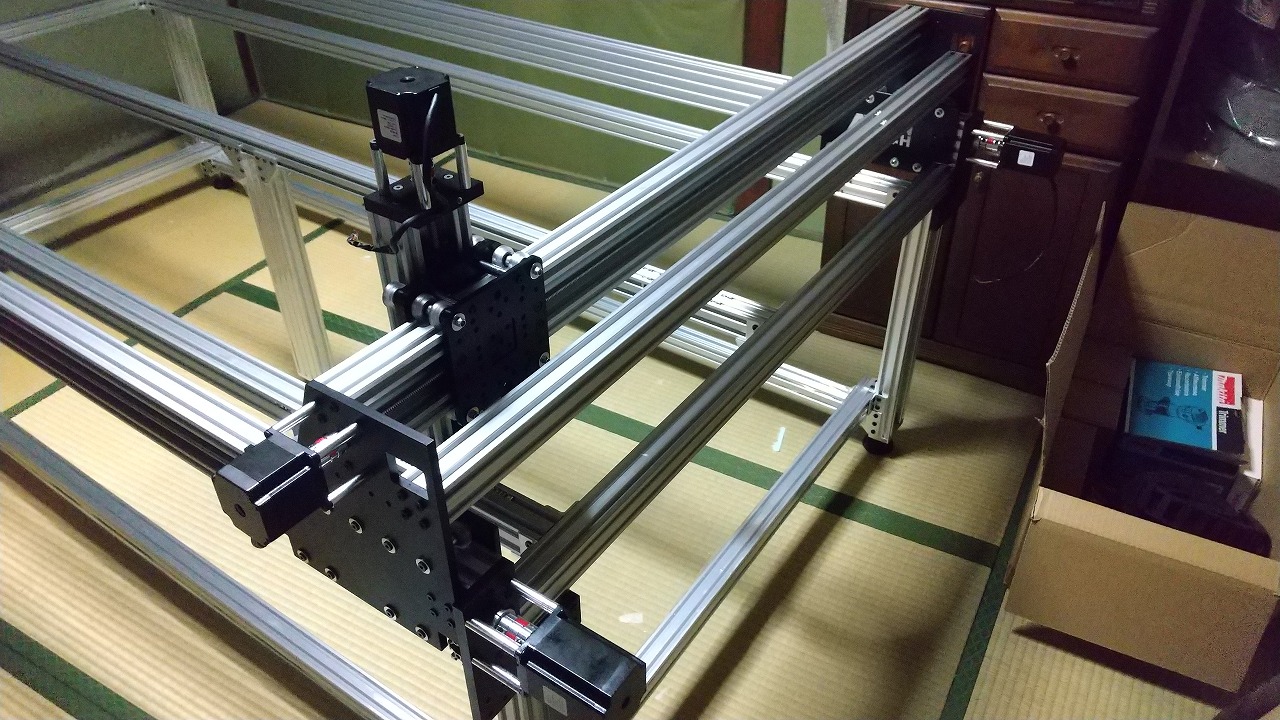
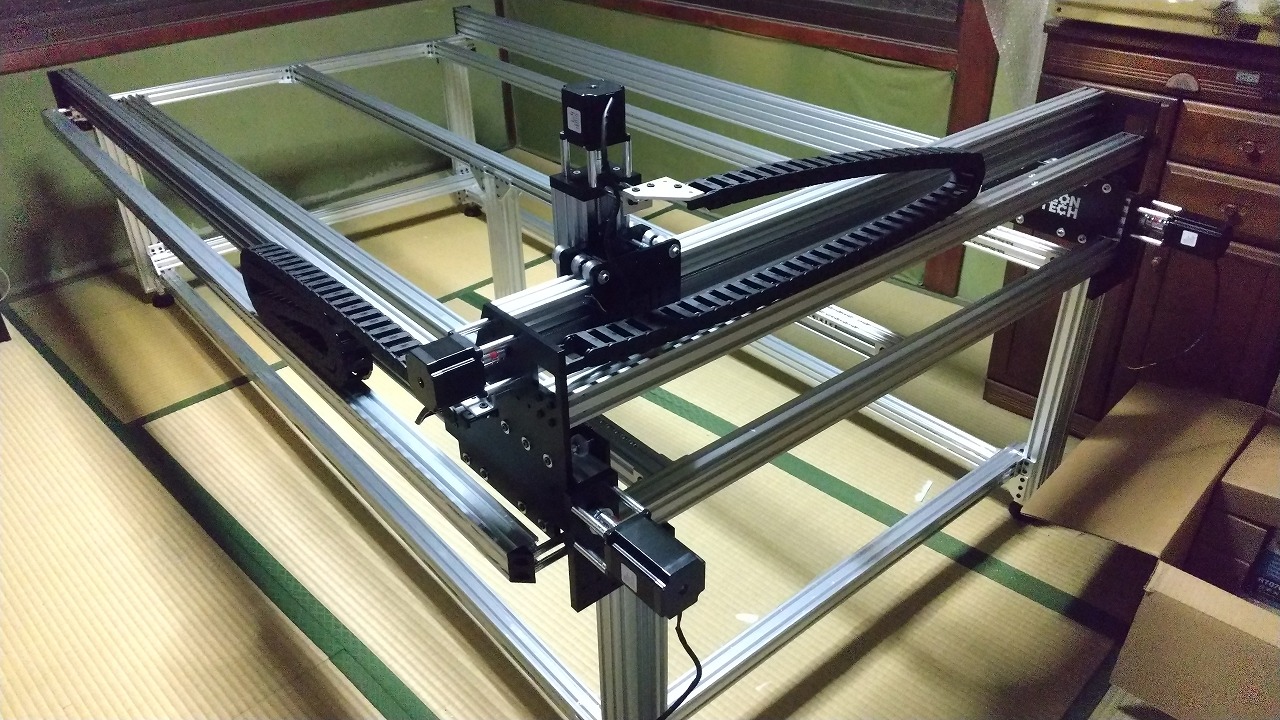
・一応完成
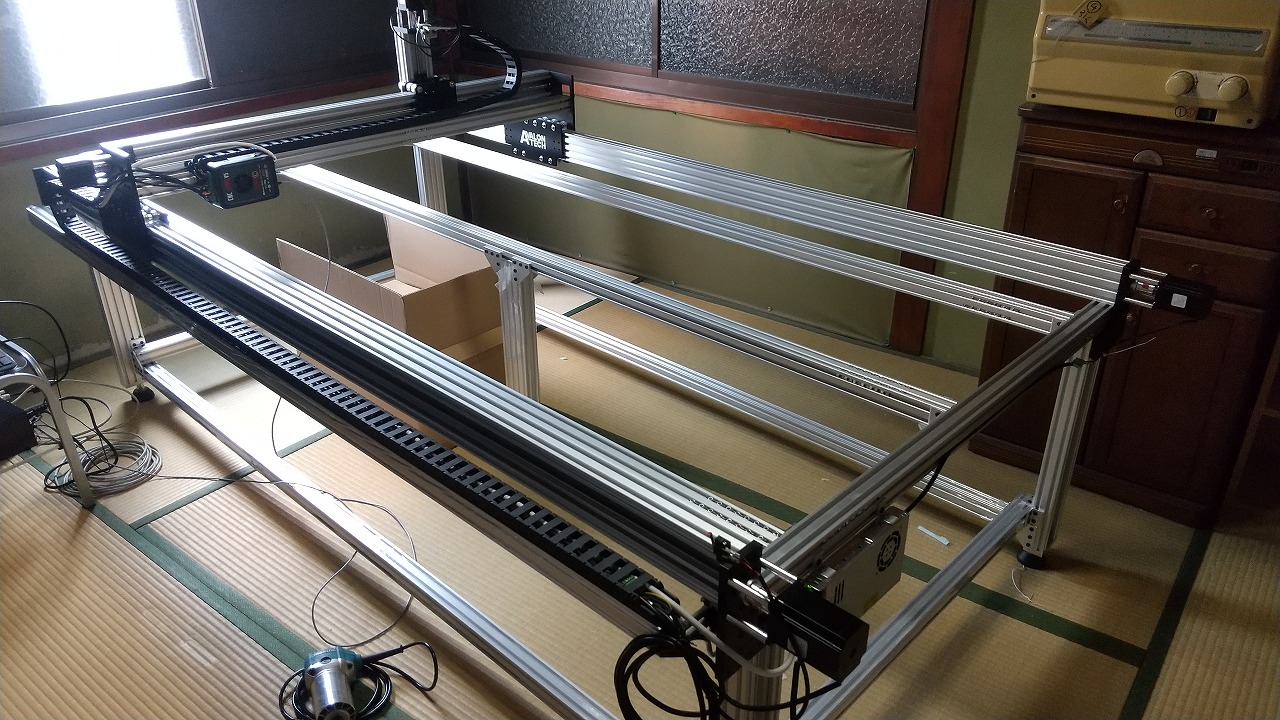
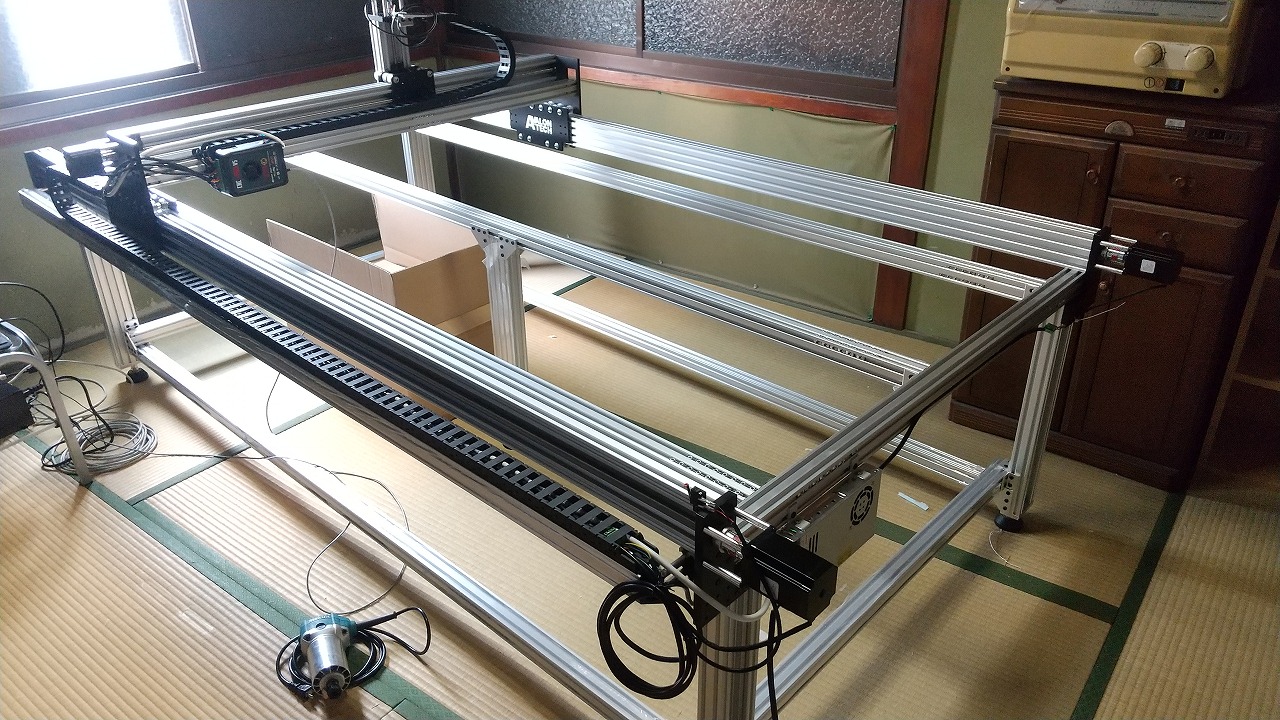
・これでケーブルの長さギリギリでした
・試験動作した時の設定
CNCjs 1.9.22 [Grbl]
COM3 にボーレート 115200 で接続中
n 8 2016 00:22:57
rst:0x1 (POWERON_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT)
configsip: 0, SPIWP:0xee
clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00
mode:DIO, clock div:1
load:0x3fff0018,len:4
load:0x3fff001c,len:1216
ho 0 tail 12 room 4
load:0x40078000,len:9720
ho 0 tail 12 room 4
load:0x40080400,len:6352
entry 0x400806b8
[MSG:Grbl_ESP32 Ver 1.3a Date 20201022]
[MSG:Compiled with ESP32 SDK:v3.2.3-14-gd3e562907]
[MSG:Using machine:CNC_xPRO_V5_XYYZ]
[MSG:Axis count 3]
[MSG:RMT Steps]
[MSG:Init Motors]
[MSG:TMCStepper Library Ver. 0x000701]
[MSG:X Axis Trinamic TMC5160 Step:GPIO(12) Dir:GPIO(14) CS:GPIO(17) Disable:None Index:1 Limits(0.000,982.500)]
[MSG:X Axis Trinamic driver test passed]
[MSG:Y Axis Trinamic TMC5160 Step:GPIO(27) Dir:GPIO(26) CS:GPIO(17) Disable:None Index:2 Limits(0.000,1892.500)]
[MSG:Y Axis Trinamic driver test passed]
[MSG:Y2 Axis Trinamic TMC5160 Step:GPIO(33) Dir:GPIO(32) CS:GPIO(17) Disable:None Index:3 Limits(0.000,1892.500)]
[MSG:Y2 Axis Trinamic driver test passed]
[MSG:Z Axis Trinamic TMC5160 Step:GPIO(15) Dir:GPIO(2) CS:GPIO(17) Disable:None Index:4 Limits(-95.000,0.000)]
[MSG:Z Axis Trinamic driver test passed]
[MSG:PWM spindle Output:GPIO(25), Enbl:GPIO(4), Dir:None, Freq:5000Hz, Res:13bits]
[MSG:Local access point CNC_xPRO_V5 started, 192.168.0.1]
[MSG:Captive Portal Started]
[MSG:HTTP Started]
[MSG:TELNET Started 23]
[MSG:Flood coolant on pin GPIO(21)]
[MSG:Mist coolant on pin GPIO(21)]
[MSG:X Axis limit switch on pin GPIO(35)]
[MSG:Y Axis limit switch on pin GPIO(34)]
[MSG:Z Axis limit switch on pin GPIO(39)]
[MSG:Probe on pin GPIO(22)]
Grbl 1.3a ['$' for help]
client> $$
[MSG:'$H'|'$X' to unlock]
$0=4 (Step pulse time, microseconds)
$1=255 (Step idle delay, milliseconds)
$2=0 (Step pulse invert, mask)
$3=7 (Step direction invert, mask)
$4=0 (Invert step enable pin, boolean)
$5=1 (Invert limit pins, boolean)
$6=1 (Invert probe pin, boolean)
$10=1 (Status report options, mask)
$11=0.010 (Junction deviation, millimeters)
$12=0.002 (Arc tolerance, millimeters)
$13=0 (Report in inches, boolean)
$20=1 (Soft limits enable, boolean)
$21=0 (Hard limits enable, boolean)
$22=1 (Homing cycle enable, boolean)
$23=3 (Homing direction invert, mask)
$24=25.000 (Homing locate feed rate, mm/min)
$25=500.000 (Homing search seek rate, mm/min)
$26=250.000 (Homing switch debounce delay, milliseconds)
$27=2.500 (Homing switch pull-off distance, millimeters)
$30=24000.000 (Maximum spindle speed, RPM)
$31=0.000 (Minimum spindle speed, RPM)
$32=0 (Laser-mode enable, boolean)
$N1=
$N0=
$100=198.000 (X-axis travel resolution, step/mm)
$101=200.000 (Y-axis travel resolution, step/mm)
$102=200.000 (Z-axis travel resolution, step/mm)
$103=200.000
$104=100.000
$105=100.000
$110=1000.000 (X-axis maximum rate, mm/min)
$111=1000.000 (Y-axis maximum rate, mm/min)
$112=1000.000 (Z-axis maximum rate, mm/min)
$113=1000.000
$114=1000.000
$115=1000.000
$120=100.000 (X-axis acceleration, mm/sec^2)
$121=100.000 (Y-axis acceleration, mm/sec^2)
$122=100.000 (Z-axis acceleration, mm/sec^2)
$123=200.000
$124=200.000
$125=200.000
$130=982.500 (X-axis maximum travel, millimeters)
$131=1892.500 (Y-axis maximum travel, millimeters)
$132=95.000 (Z-axis maximum travel, millimeters)
$133=300.000
$134=300.000
$135=300.000
ok
・とりあえずここまで